Maybe they are here, but we're too stupid to perceive them. Like an animal not realizing it's in a zoo.
Maybe they are here, but we're too stupid to perceive them. Like an animal not realizing it's in a zoo.
There are serious theories about us being watched and controlled by a bunch of aliens, like truman show.
It's one of the solutions to the Fermi paradox, coincidentally.
last edit on
2/13/2023 2:59:50 PM
Given the position the U.S. government has taken a long with releases concerning observed performance of UAP/UFO maybe they are already here.
A few years back I enjoyed this paper : Estimating Flight Characteristics of Anomalous Unidentified Aerial Vehicles
Knuth, Powell, Reali said:Several Unidentified Aerial Phenomena (UAP) encountered by military, commercial, and civilian aircraft have been reported to be structured craft that exhibit ‘impossible’ flight characteristics. We consider a handful of well-documented encounters, including the 2004 encounters with the Nimitz Carrier Group off the coast of California, and estimate lower bounds on the accelerations exhibited by the craft during the observed maneuvers. Estimated accelerations range from almost 100g to 1000s of gs with no observed air disturbance, no sonic booms, and no evidence of excessive heat commensurate with even the minimal estimated energies. In accordance with observations, the estimated parameters describing the behavior of these craft are both anomalous and surprising. The extreme estimated flight characteristics reveal that these observations are either fabricated or seriously in error, or that these craft exhibit technology far more advanced than any known craft on Earth. In many cases, the number and quality of witnesses, the variety of roles they played in the encounters, and the equipment used to track and record the craft favor the latter hypothesis that these are indeed technologically advanced craft. The observed flight characteristics of these craft are consistent with the flight characteristics required for interstellar travel, i.e., if these observed accelerations were sustainable in space, then these craft could easily reach relativistic speeds within a matter of minutes to hours and cover interstellar distances in a matter of days to weeks, proper time.
It's important to keep in mind that the paper is estimating the flight characteristics based on anecdotal evidence and whats been said about radar signatures measured during the mentioned encounters. A much more accurate estimation could be made if the radar data was actually released.
The estimate of 100g-1000g is what's particularly interesting to me. The most advanced ICBMs are rated at 100g and typically only experience around 60g during reentry. As such, of the estimates are accurate whatever such craft are they have to be using highly advanced material engineering if they are to be considered conventional.
If such craft are considered to exist then they are either made by Humans or not made by humans. If the estimated flight characteristics are only roughly accurate then either some human organization has highly advanced propulsion and material technologies unknown to everyone (some kind of highly secret military program) or they are not of this world.
I don't think its necessarily unlikely they we may be capable of making such things. The first thing to observe is that there are technological gaps between known and highly produced advance technology. For instance, the United States stealth and propulsion programs are about 20-30 years ahead of all other competitors. That is not to say that China or Russia cannot produce something with the same performance as F22/F35, rather they cannot mass produce such aircraft. Examples of this production issue are su57 which is about 10 years behind in propulsion and stealth but have very low production rates compared to F35 and F22 (during its production). Chines have the J20 and J35, and both have decent delivery times both use stealth and propulsion systems on par to what the US was using during the 80's and early 90's.
Given the existence of technological caps between known craft, one can speculate that perhaps the united states or some other nation with advanced aeronautic engineering capabilities has prototyped something insanely advanced that can't be mass produced. Lets say this craft is 50-100 years ahead of what can be reasonably mass produced. This has happened before with the production of the SR71 back in the 60's. Thirty-two were built, though I am not sure when peek production was, and the stealth technologies utilized for that craft are not all that different from what the U.S. used for the F117 back int he 80's and what the Chinese are using now, which is a 30-50 year gap in technological capabilities.
The above is mostly considering the observed UAPs to be conventional, however according to accounts by pilots a long with scanning radar on their craft the UAPs do not use traditional propulsion. If that's the case and they are human made then someone has cracked some exotic physics/engineering. I won't go on about this but their is a very real history of exotic propulsion research programs in the united states that date back to the early 50's.
Wasn't the Nimitz Carrier Group incident figured to be a visual artifact of the recording equipment?
That was made popular by the youtuber Mick West.
He may be correct, perhaps their are visual artifacts. This does ignore however the eye witness testimony of multiple pilots that witnessed the even (of course they are fallible) and radar readings stated to exist from both the scanning radar of the aircraft and nimitz carrier group.
I personally only care about the stated radar readings which evidently show the craft moving 50 miles away in a fraction of a second, which is ~Mach 60. A similar reading is observed during one of the other incidents where the craft drops from 100,000 ft to a few feet above the water going Mach 60.
As for the validity of the 'visual artifact' theory, the paper I linked gives an alternative view based on analysis of the videos.
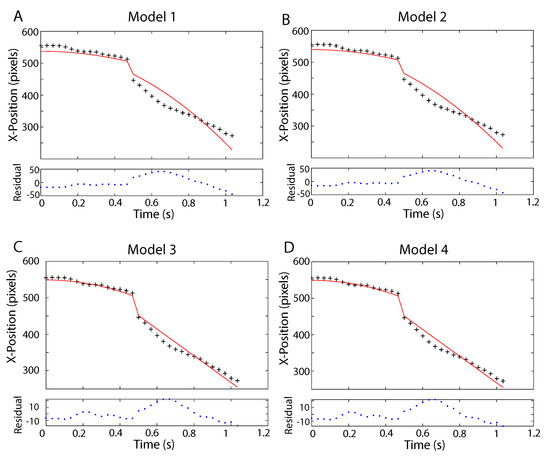
We examined the last 32 frames of the Nimitz video in which the Tic-Tac UAV accelerated to the left and the targeting system lost lock. The video frame rate was 29.97frames/s. From 0.267s (8 frames) before the analyzed segment of video through the end of the analyzed segment of video, the aircraft orientation was fixed and the ATFLIR orientation was fixed at a zenith angle of 5∘ above the aircraft axis and at an azimuthal angle of 8∘left of the aircraft axis, so that the apparent motion of the UAV in the video frames is attributable only to the physical motion of the UAV. This means that, for the sake of this analysis, the UAV can be treated as if starting from rest with respect to the aircraft.As the UAV accelerates, the image of the UAV becomes elongated and blurred. If the shutter speed was known, then this information could be used to better estimate the speed of the craft. This could be accomplished by treating the shutter speed as a model parameter, but such analysis is beyond the scope of this project. Instead, we concentrated on tracking the position of the right edge of the UAV and using those positions to estimate the kinematics. The left edge of the UAV was also estimated in the first frame to provide some information about the range, z_o, to the UAV given that the UAV was estimated to be at least 40 feet in length. However, since the orientation was not known, this is modeled as a uniformly distributed unknown parameter ϕ, which allowed one to at least put an upper bound on the range z_o. For clarity, it should be noted that the Tic-Tac UAVs were described as being about 40 to 50ft in length or the size of the F-18, which is 56ft. Here we assume that the UAV is 40ft in length, which is probably an underestimate. As such, the estimated accelerations are expected to be underestimated, and thus more conservative.To estimate the position of the right edge of the craft in each frame (Figure 5A), the row of pixels for which the UAV has a maximum intensity was examined. The pixel intensities along that row at the right edge of the UAP were fit (maximum likelihood method with a Student-t likelihood) to half of a Gaussian curve. The center position of the Gaussian plus the standard deviation was used as the position of the right side of the UAV for that frame (Figure 5B). Horizontal positions of the UAV are related to the pixel coordinates by noting that the entire field of view (approximately FOVpix=606pixels) corresponds to an angular field of view of 0.7∘in the narrow (NAR) mode, which is indicated in the upper left hand corner of the video. At the range, z_o, of the UAV this results in the proportion where Xscale
has units pixels/m when z_o is in units of m. A similar relation holds for the vertical position of the UAV, but it was not used in this analysis. The ATFLIR has a zoom feature that can change the field of view. In the Nimitz video frames analyzed, the zoom is first set to unity in the NAR mode so that the angular field of view is 0.7∘. However, at Frame 16, the zoom changes to two, so that the angular field of view in the NAR mode changes to 0.35∘. This appears as a discontinuity in the data (‘+’ symbols) illustrated in Figure 6.We consider several different kinematic models analyzed using nested sampling, and statistically test them by comparing the log Bayesian evidence. The coordinates were defined so that the x-direction corresponds to motion to the left and right, and the z-direction corresponds to motion toward and away from the camera. We used uniform prior probabilities for the kinematic parameters as well as a Student-t likelihood function, which is robust to outliers, such as those due to camera (airplane) motion. The first kinematic model assumes that the UAV started from relative rest and accelerated with a constant rate of ax to the left. The model then provides the position of the UAV as a function of time, where ti is the time of the ith video frame:so that there are four model parameters: the UAV’s acceleration ax, its initial position x_o, its range z_o, and its orientation ϕ in the first frame, which helps to set the scale.The second kinematic model considers constant acceleration in both the x and z directions:The last two models describe the kinematics as acceleration followed by motion at constant velocity:The models were analyzed using a nested sampling algorithm [17,26,27], which allowed for the estimation of the logarithm of the Bayesian evidence, logZ, as well as the logarithm of the likelihood, logL, and mean estimates of the model parameters. The analysis was performed for N=500 samples and was run until the change in logZ from successive iterations was less than 10−5, ensuring a reliable estimate of the log evidence. Tests were performed to ensure that the trial-to-trial variations in parameter estimates were within the estimated uncertainties.The results of the nested sampling analysis are listed in Table 1. The uncertainties in the logZ estimates (not listed) were on the order of one or less. We see that Model 4, which describes the motion of the UAV as a constant acceleration to the left and away from the observer for the first 15 frames (approximately 0.53s) is the most probable solution with acceleration components of ax=−35.64±0.08g and az=67.04±0.18g for an overall acceleration of about 75.9±0.2g. While Model 4 describes the data well, the residuals indicate that a more precise model would consist of multiple episodes of acceleration and deceleration during the maneuver. This was observed in SCU’s analysis [22] where the accelerations were estimated to vary from around 40 to 80 g.A more detailed analysis would involve modeling the motion of the UAV more precisely by modeling the pixel intensities on the video frames themselves. One could consider the shutter speed of the camera, which would take advantage of the blurring of the UAV image due to its motion while the shutter was open. In addition, the “change points” at which the accelerations changed could be treated as model parameters. This would allow for more precise estimates of the UAV’s behavior.
They're not real.
Prove it.
Ę̵̚x̸͎̾i̴͚̽s̵̻͐t̷͐ͅe̷̯͠n̴̤̚t̵̻̅i̵͉̿a̴̮͊l̵͍̂ ̴̹̕D̵̤̀e̸͓͂t̵̢͂e̴͕̓c̸̗̄t̴̗̿ï̶̪v̷̲̍é̵͔
Wikipedia said:Proving a negative
It asserts the non-existence or exclusion of something. A negative claim may or may not exist as a counterpoint to a previous claim. A proof of impossibility or an evidence of absence argument are typical methods to fulfill the burden of proof for a negative claim.
Thrall to the Wire of Self-Excited Circuit.
Actually I can prove it. There is no large bodied or even bacterial life that would be able to reach Earth from another planet because there are no habitable planets close enough to Earth and no space rocket can reach the speed of light because of the laws of physics that states that matter cannot move the speed of light.
By saying "they're not real," I mean the presence of human-like aliens on Earth.
last edit on
11/17/2023 5:39:42 AM